Configuring the system
Contents
RoboPLC Manager
RoboPLC Manager is a server which provides a convenient way to manage RoboPLC programs, monitor their states as well as the overall system state.
Installation
Before installing RoboPLC Manager, read RoboPLC Manager License.
RoboPLC Manager is compatible with Debian, Ubuntu, Raspbian and other Debian-based Linux distributions. Binaries are available for 64-bit x86 and 64-bit ARM architectures.
To install RoboPLC Manager, add the repository and install the package:
curl https://pub.bma.ai/apt/setup | sudo sh
sudo apt-get install roboplc-manager
sudo systemctl start roboplc.manager
Optionally, install RoboPLC CLI tool for local management:
curl -s https://pub.bma.ai/roboplc/cli/robo.current.linux-$(uname -m) \
-o /usr/local/bin/robo && chmod +x /usr/local/bin/robo
The Web UI is available by default at http://IP:7700. The default management key is roboplc.
The management key and other settings can be changed in the configuration file /etc/roboplc/manager.toml.
[general]
verbose = false
# enable to use the internal grep in case if journalctl is built without it
#journal_internal_grep = true
# specify if the manager is unable to auto-detect the block device
#blk_dev = "sda"
# license file for RoboPLC Pro
#license_file = "/etc/roboplc/roboplc.key"
# requires RoboPLC Pro
#readonly_drive = true
[http]
bind = "0.0.0.0:7700"
# set if a front-end server is used
#real_ip_header = "X-Real-IP"
[aaa]
management_key = "roboplc"
## OpenID JWT token flow configuration
# Allows to use external authenticators on front-end servers
# (e.g. Gateryx, Traefik+Authentik, other reverse proxies with OIDC support)
#[aaa.oidc]
# path or URL to JWKs (JSON Web Key Set), supports single and multiple keys in
# one file, required
#key = "/etc/roboplc/oidc.jwk"
# JWT assertion HTTP header name
#header = "X-JWT-Assertion"
# JWT field to use as username
#sub_field = "sub"
# refresh JWKs every N seconds (default: 3600)
#refresh = 3600
# retry interval in seconds if JWKs fetch fails (default: 10)
#retry = 10
# remove existing JWKs on fetch failure after seconds (default: 600, 0 - do not remove)
#failed_after = 86400
# list of the users to permit access
#valid_users = [ "plcadmin" ]
[ui]
confirm_actions = true
After modifying, the service must be restarted:
Note
Starting from RoboPLC manager 0.2, the configuration file format has been changed to TOML. The YAML format is still supported, but has been DEPRECATED.
sudo systemctl restart roboplc.manager
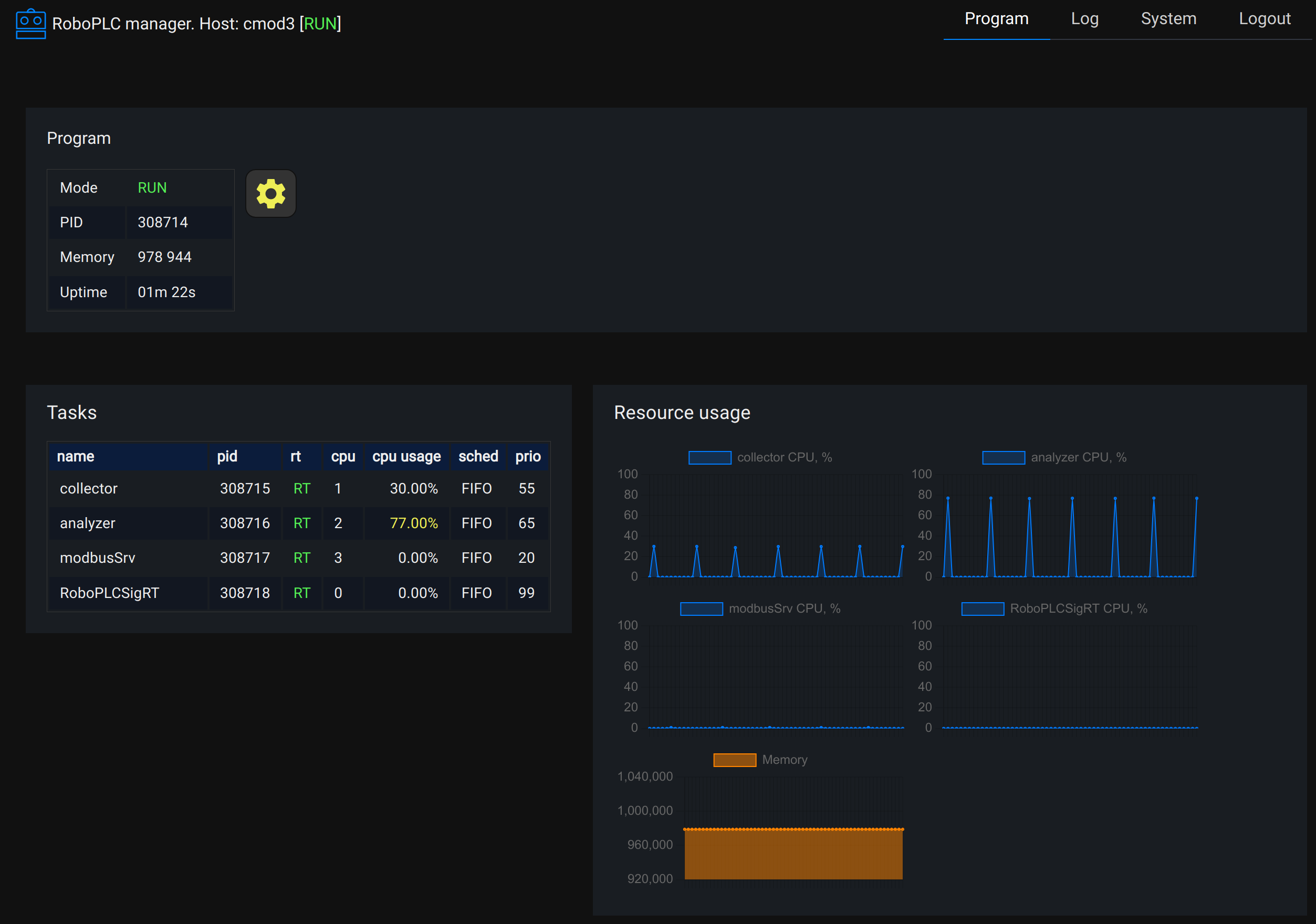
Layout
Modes
RoboPLC Manager brings the traditional PLC paradigm:
There can be only one active program at a time.
The host can be either in CONFIG or RUN state. When the host is in CONFIG state, the program can be modified (flashed). When in RUN state, the program is executed.
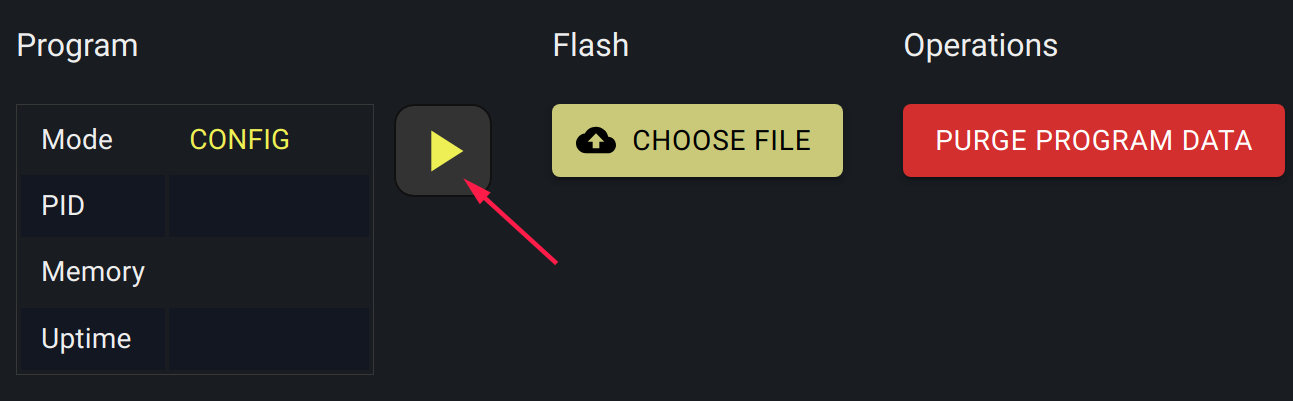
Use the marked button to switch the host between CONFIG and RUN states.
The button Purge program data is used to remove all data in /var/roboplc/data folder (use with caution!).
Services and folders
RoboPLC Manager automatically enables and starts a systemd service named “roboplc.program”
The program binary is stored in /var/roboplc/program, the current binary is named “current”.
The program working directory is /var/roboplc/data, where the program can store files, databases and other data, required to run.
The program must be always compiled as a single binary file.
The program is always started as root. It is highly recommended either keeping field-bus fully isolated (preferred) or dropping process privileges at some point.
Logging
The program must log to stdout, with no timestamps. The Rust method roboplc::configure_logger automatically configures logger for that.
The log viewer is an interface for journald and can view logs from both the program and other systemd services:
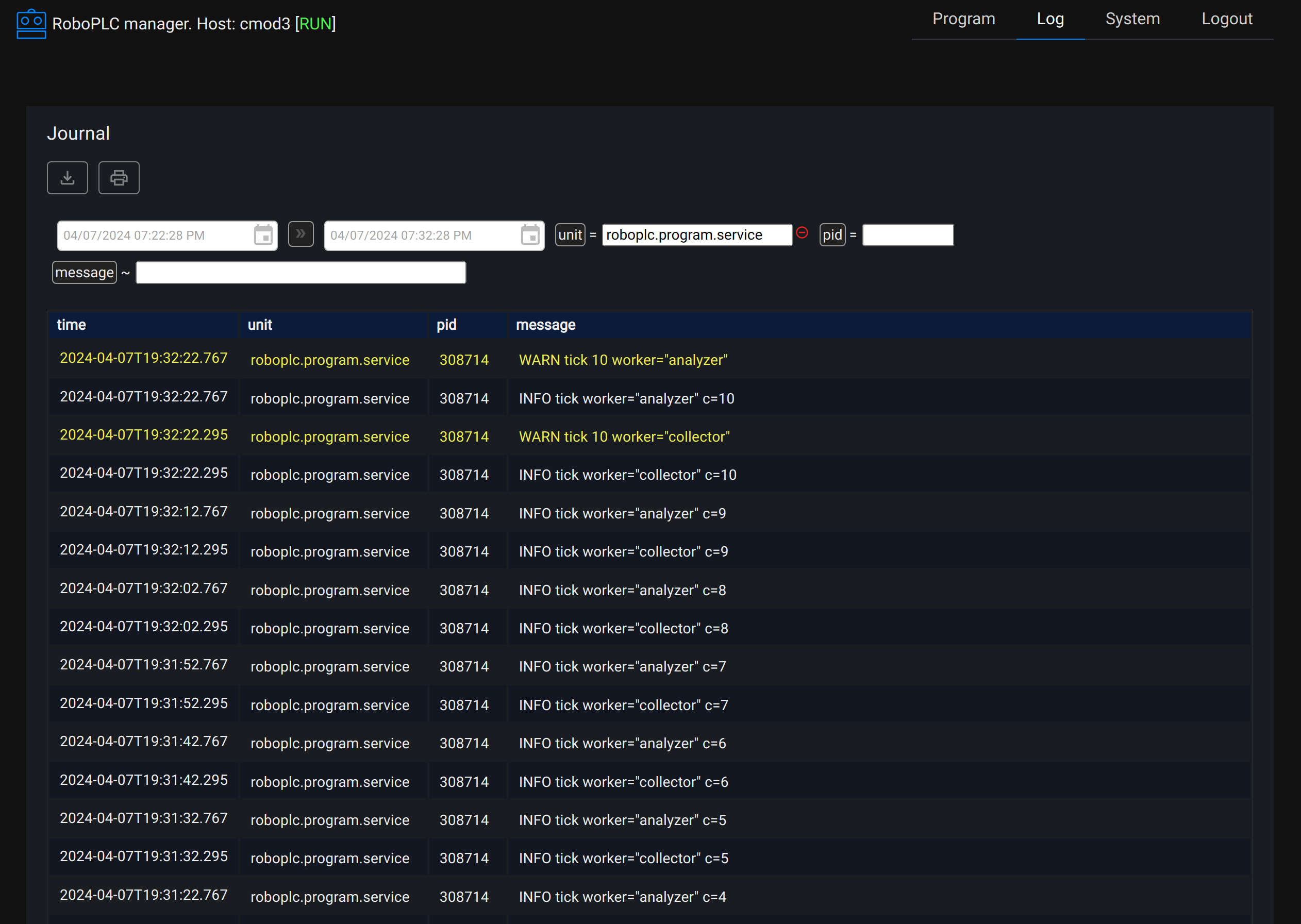
Note
Emebedded systems, disconnected from networks, may have no time synchronization. Starting from RoboPLC Manager 0.2, the log viewer ALWAYS displays log timestamps in local (client) time, calculating possible differences with the remote clock and applying them to the output.
Uploading a program (flashing)
A program binary can be uploaded either using the Web UI or robo CLI command (see Flashing).
Environment variables
It is not recommended to use environment variables in RoboPLC programs, each program must be self-contained and built for a specific configuration.
However if a program requires environment variables and there is no plan to avoid them/rewrite the code, they can be set in the file /etc/roboplc/program.env. The file format is NAME=VALUE, one per line:
VAR1=value1
VAR2=value2
Uninstalling RoboPLC Manager
To uninstall RoboPLC Manager, run:
sudo apt-get remove roboplc-manager
Note that the program is not automatically stopped and the service is not uninstalled. To stop the program and uninstall the service, run:
sudo systemctl stop roboplc.program.service
sudo systemctl disable roboplc.program.service
rm -f /etc/systemd/system/roboplc.program.service
systemctl daemon-reload
Kernel
It is highly recommended to switch the system to a real-time kernel. Consider reviewing documentation for your distribution.
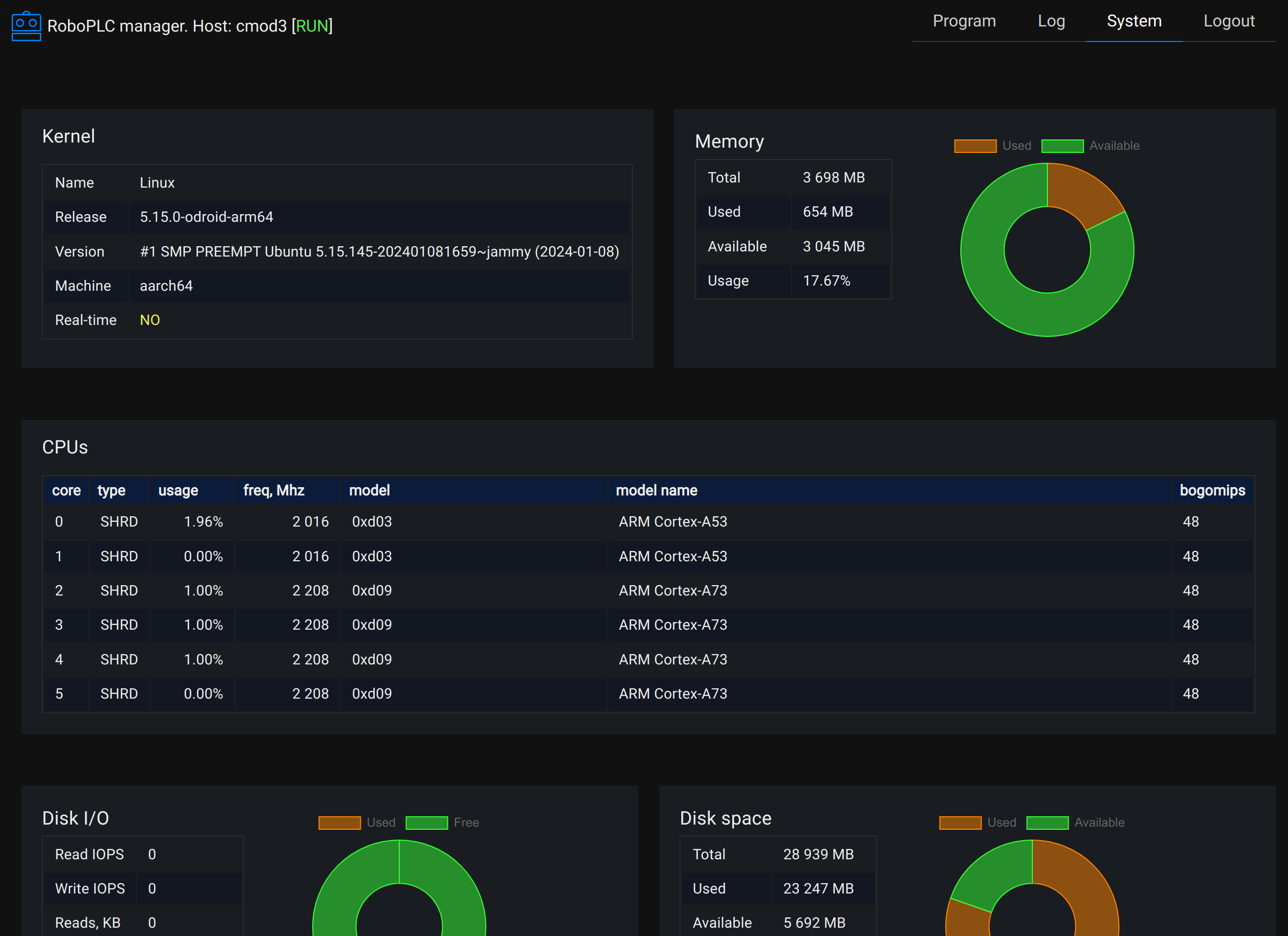
CPUs
CPU isolation
It is highly recommended to isolate CPUs for real-time program threads. To do this, add the following kernel boot parameters:
isolcpus=2,3,4
where 2,3,4 are CPU cores to isolate (starting from 0).
CPU governor
If certain tasks require the lowest latency possible, it is recommended to set CPU governor to performance for the cores used by such ones:
let _governor = roboplc::system::CpuGovernor::performance([1,2,3])?;
The above code sets CPU governor to performance for cores 1, 2 and 3. Note that it is enough to set the governor to a single core per physical CPU.
The operation sets CPU frequency to the maximum possible, which increases power consumption, but also may significantly reduce latency.
Memory allocation
Memory allocation/deallocation operations can significantly slow down real-time tasks. To resolve this, either avoid dynamically allocating/dropping variables which use heap memory (maps, vectors, etc.) or use RoboPLC heap pre-allocation:
roboplc::thread_rt::prealloc_heap(20_000_000).unwrap();
The above code pre-allocates 20 MB of heap memory plus prevents existing process memory (after fixing, the pages are extended to 5-10 MB in total) from being dropped.
The code needs to be executed once, at the beginning of the program.
IRQs
IRQs from devices can significantly slow down real-time tasks. To resolve this, move IRQs to shared CPUs (not isolated) or disable the devices which are not used.
Refer to the documentation for OS distribution and hardware for more details.
Mission-critical systems
Linux-based PLCs should be used in mission-critical systems only accompanied by a watchdog. A watchdog can be either another Linux machine or a bare-metal MCU, which continuously monitors pulse of critical PLC threads and puts the system into emergency state in case of failure.
heartbeat-watchdog crate, which is a part of RoboPLC eco-system, can be used to easily implement such kind of monitoring.
Troubleshooting
Real-time thread parameters can not be set with “operation not permitted”
Make sure the program is running with root privileges.
Set /proc/sys/kernel/sched_rt_runtime_us to -1 either manually or using RoboPLC SystemConfig:
use roboplc::system::SystemConfig;
let _sys = SystemConfig::new().set("kernel/sched_rt_runtime_us", -1)
.apply()
.expect("Unable to set system config");
Hardware
RoboPLC works on various hardware, from Raspberry Pi Zero to big industrial machines.
RoboPLC is designed to run on bare-metal Linux, with no virtualisation.
It may be not the best idea to run RoboPLC programs in containers, unless you know what you are doing.
Always remember that RoboPLC is a software, not a hardware. It can not do a miracle and turn $20-worth micro-computer into a high-performance industrial controller. Choose a proper hardware for your applications wisely.
See more: Compatible hardware.