Opener robots
Logic manager provides built-in generic logic for opener robots, handling such common tasks as door or window opening.
Hardware schemas
AC circuit
The equipment must be connected to 2 relay ports: the first one gives power to motors, the second one sets the direction:
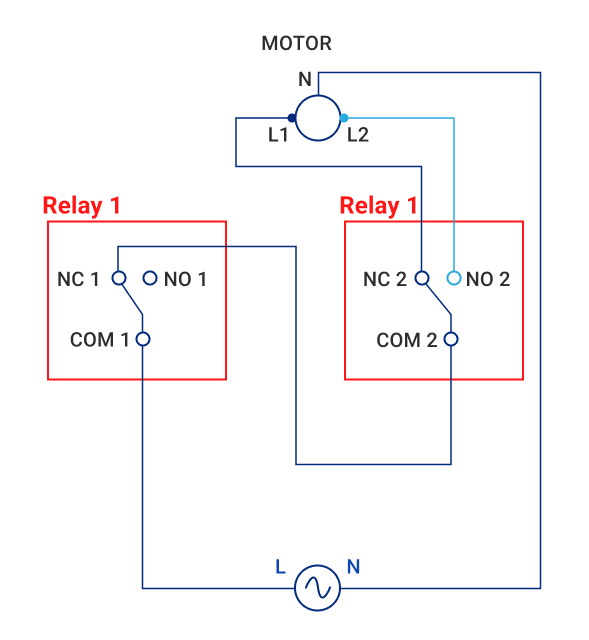
AC motor circuit
RDC circuit
The equipment must be connected to 2 relay ports: the first one gives + power to motors, the second one gives -:
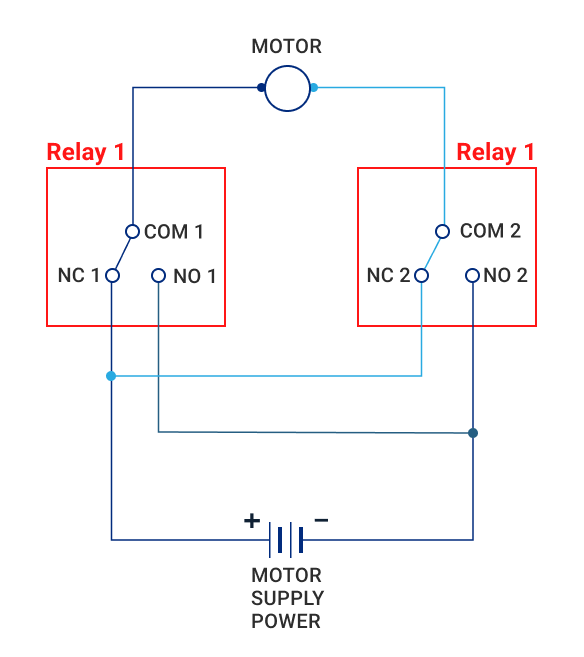
Reversible DC motor circiut
Software configuration
A virtual “door” or “window” unit must be created and have its action mapped to Logic Manager PLC service instance:
oid: unit:tests/win1
action:
svc: eva.controller.lm1
timeout: 15.0
enabled: true
The action timeout must be set to the max possible combined opener action timeout.
After, an opener robot virtual unit must be created in LM PLC instance. See Logic manager for more details.
Opener robots use relay ports, mapped as EVA ICS units. The ports can be located on any supported equipment. It is also possible (but not recommended) to use ports, located on remote nodes as well.
In case of action kill/terminate, the robot turns all relay ports off.