Drivers
Universal Controller uses 2 ways for controlling and monitoring items: item scripts and drivers. Drivers are the most advanced way, they are faster, contain all process logic and can be used to work with devices on a single bus, providing locking/unlocking mechanisms.
Code of driver is executed directly inside the controller core and unlike script can’t be terminated, unless it gets termination signal and decides to stop. If driver process causes timeout and there is no way to stop it, controller raises a critical exception and may terminate itself.
You should always use only reliable and tested drivers, otherwise your system may become unstable.
Structure
Each driver contains 2 modules: LPI (logical to physical interface) and PHI (physical interface). To load new driver into controller, follow the steps:
List the available PHI mods:
eva uc phi mods
Get PHI module information:
eva uc phi modinfo <phi_module>
If the desired PHI is not listed, download it and put to xc/drivers/phi folder. See the official v3 PHI module list. You may either download a module manually or use
eva uc phi download <phi_module_uri>
command. Note that UC host doesn’t need to have a direct connection to the host you download PHI from, module is downloaded first to the host where eva CLI (or eva uc) is started, verified and then automatically uploaded to the controller.
Execute the command to list PHI configuration variables:
eva uc phi modhelp <phi_module> cfg
This will display the configuration variables, used when PHI is loaded (port numbers, default values etc.). Variables marked required=True should be always defined otherwise controller will fail to load PHI.
Load PHI with the following command:
eva uc phi load <phi_id> <phi_module> [-c config] [-y]
# example
eva uc phi load v1 vrtrelay -c default_status=1,update=5 -y
Param -y is used to ask the controller to save driver configuration right after PHI is loaded.
After the successful load, PHI will automatically create the most suitable driver for itself, called <phi_id>.default. This usually provides basic driver logic and doesn’t mean the driver is suitable for your task. You may replace it’s LPI module or define a different driver with another LPI.
To assign driver to the specified item, use the command:
eva uc driver assign <item_id> <driver_id> [-c config] [-y]
# example, set test_lamp to 5th relay port of driver v1
eva uc driver assign unit:lamps/test_lamp v1.default -c port=5
Param -y is used to ask the controller to save item configuration right after driver is assigned.
Param -c is used to set driver configuration for the specified item: set port, logic etc.
Advanced usage: EVA item can have different drivers or scripts for actions and updates. To assign different drivers, modify item properties action_exec, update_exec, action_driver_config and update_driver_config (e.g. with eva uc config props). Driver is assigned to the property with |driver_id value, e.g. |v1.default.
Note
All custom-defined user variables are always passed to driver function calls, which allows to set some device-specific or logic-specific options as global or for the particular item group.
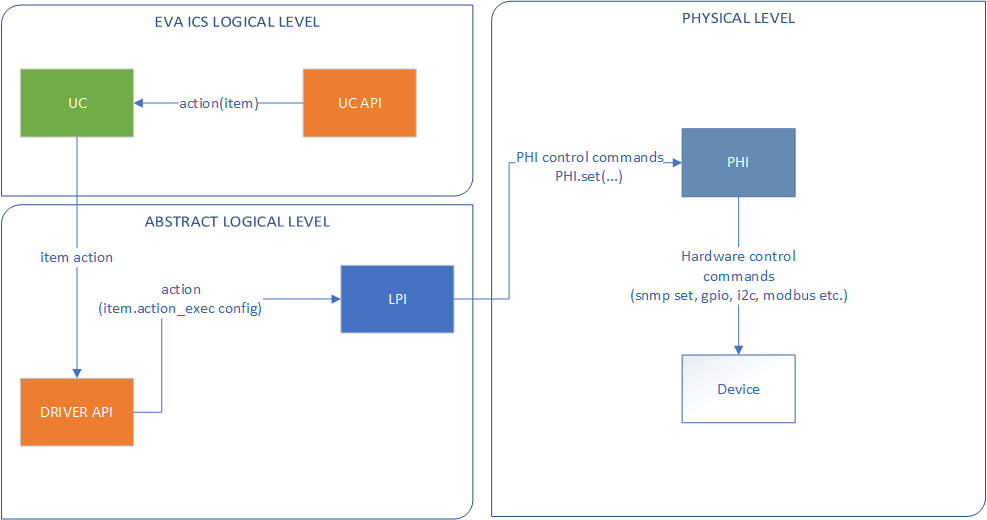
How the driver handles action commands
Note that params started with _ are passed to PHI calls directly (without _ prefix), this allows specifying different hosts, bus addresses (if PHI is developed as “universal”) without a need to load different drivers for each item.
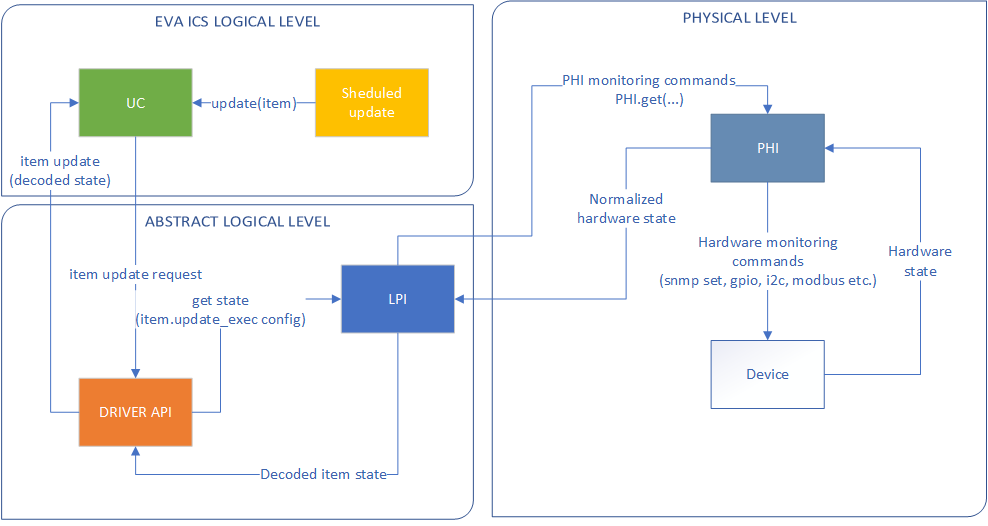
How the driver handles update commands
Use commands eva uc phi unload and eva uc phi unlink to unload and unlink unnecessary PHI modules, but note that driver and PHI can’t be unloaded while they’re assigned to items. You must first assign a different driver to the item or use eva uc driver unassign command.
You can load PHIs/drivers with the same IDs even if they are already present in the system without unloading them first. In this case, new modules/configuration replace the old ones.
Logical to physical interfaces (LPI)
LPI module handles the whole driver logic and doesn’t contain any code, specific for the equipment. All it needs is to process the logic and call the assigned PHI.
When the controller loads new PHI, it creates a driver called <phi_id>.default, assigning LPI to provide basic functionality, but you may want to replace it or use different logic for different items.
To list available LPI mods, use the command:
eva uc lpi mods
To get module information, use the command:
eva uc lpi modinfo <lpi_module>
Currently we don’t provide any additional LPI modules or SDK, all available mods are included in EVA ICS distribution.
To get additional module info, use the following commands:
# list module configuration options
eva uc lpi modhelp <lpi_module> cfg
# list module options used when action is called
eva uc lpi modhelp <lpi_module> action
# list module options used when state update is called
eva uc lpi modhelp <lpi_module> update
Configuration options are used when you load a driver (e.g. to modify LPI default behavior), separated with commas.
Action and update options are used when you assign a driver to the specified item; separate them with commas. Options marked required=True should be always defined.
Let’s see what modules are available.
basic LPI
Basic status on/off LPI module, used to control simple devices which have only status 0 (OFF) and 1 (ON), i.e. lamps, relay ports (directly) etc.
Used in default drivers for relay, sockets and similar PHIs, doesn’t need to be configured when loaded.
When assigning driver containing basic LPI mod to the specified item (eva uc driver assign), the assigning configuration should contain port number (-c port=N) which usually matches the physical relay port.
Port number can be specified as a list (-c port=N1|N2|N3), in this case all listed ports will be used in commands.
Note
If relay port number is specified as i:N e.g. i:2, LPI commands will consider it is inverted (falling edge) meaning 0 is for on and 1 is for off. This works both for basic as well as for any other relay control LPI.
sensor LPI
Basic sensor monitiring, used to get data from specified sensors.
Used in default drivers for sensors, doesn’t need to be configured when loaded.
LPI does not provide action functionality. When assigning driver containing sensor LPI mod to the specified item (eva uc driver assign), the assign configuration should contain a port or a bus address number.
ssp LPI
Similar to sensor LPI, but doesn’t contain any options at all. Used when PHI can work only with one physical equipment (e.g. sensor with TCP/IP API) and all equipment options are already set in PHI.
esensor LPI
Sensor monitoring with advanced functions. Can monitor physical sensor groups returning average, maximum or minimum value. Can ignore sensor values if they seem to be invalid in case one or several sensor in a group fail (while there are enough working sensors in a group).
Configuration options (set with eva uc driver load):
skip_err If True, failed physical sensor in a group will be skipped, otherwise EVA sensor item gets error value.
gpf Group port function, get values from the sensors in a group, then return:
avg average value
max maximum value
min minimum value
first first available value from any working physical sensor
max_diff maximum value difference until the sensor in a group is marked as failed and its value is ignored. E.g.: set this option 10 and let it poll the temperature sensors group. All sensors with temperature difference 10 degrees or more from the average are ignored.
Update options (set with eva uc driver assign):
port driver port or ports (array). If you use multiple ports (group), they should be separated with pipes (|) for the items. Group separation for EVA multiupdate items should be made with double pipes (||)
any configuration option (optional). E.g. if gpf=avg is defined, it overwrites default LPI behavior for the specified item.
multistep LPI
Module used for such common tasks as door or window opening. To use this module you must connect your equipment to 2 relay ports: one will give power to motors, the second will set the direction.
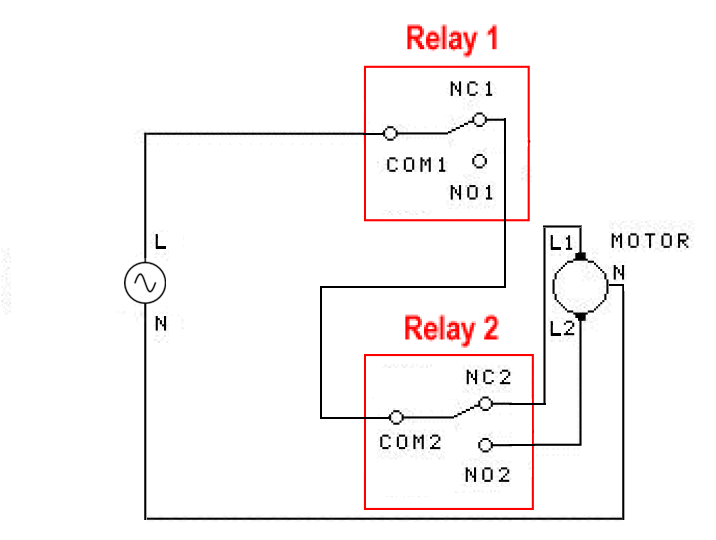
AC motor circuit
Configuration options (set with eva uc driver load):
bose (break on state error). The module requires to know the current door or window position is. If you set this option to True and the current item status is error, the action will be not executed. Otherwise LPI will pass and consider the item status is 0.
logic default or rdc (reversible DC motor circuit). If set to rdc, LPI will set port = 1, dport = 0 for “opening” and port = 0, dport = 1 for “closing”.
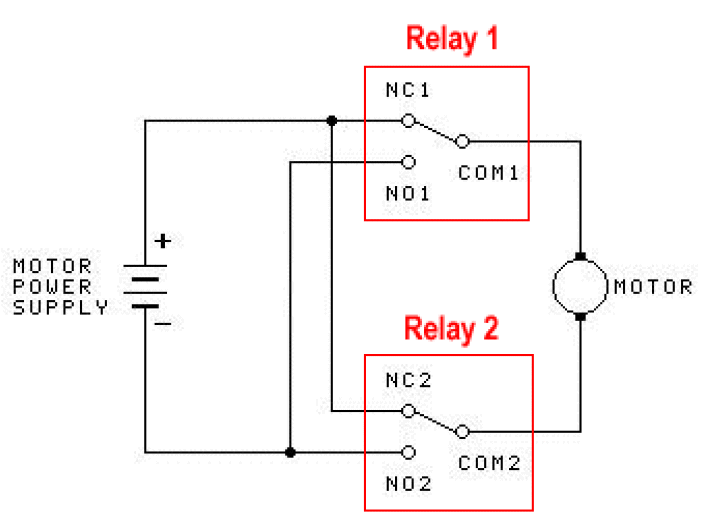
Reversible DC motor circiut
Action options (set with eva uc driver assign):
port contains one or several (separated with |) relay ports used to power a motor (or plus for reversible DC).
dport contains one or several (separated with |) relay ports used to set a direction (or minus for reversible DC).
steps list of float numbers, contains time (in seconds) of power access period to the motor to reach the next step. E.g. you have a door with 3 positions: closed, half-open and completely open. steps option will contain 2 numbers (e.g. 20|25) which tells LPI the door state from 0 to 1 is changed with running motor for 20 seconds, the state from 1 to 2 is changed with running motor for 25 seconds, so LPI can automatically calculate the full opening/closing cycle is 45 seconds.
warmup float number (seconds). LPI will add this value to the time for running the motor if the state is neither fully open nor fully closed, to let it “warm up” before doing actual work.
tuning float number (seconds). LPI will add this value to the time, if action is open full or close full to make sure the door is fully open/closed.
ts (to-start) number which indicates the following: e.g. you have a door with status from 0 (fully closed) to 5 (fully open) and defined the middle states with steps. But when calling action “set this door to 2” you can’t be sure the door position is equal when setting it from fully open and fully closed. But if you set e.g. ts=2 and the current status is greater than 2, it will tell LPi firstly to completely close the door (go to status=0) and then go to status=2.
te (to-end) same as ts but in an opposite way: set the status number, starting from which the door will be fully open first, then go to the desired status.
Note
LPI will completely refuse to run the action if it calculates that therese is not enough time to complete it. Set unit action_timeout to the proper value.
Update options:
The module doesn’t provide any state update functionality. If you want to sync door/window item states with real, use separate reed switch sensor.
Loading driver with the chosen LPI
Firstly, you can list available LPIs with the command:
eva uc lpi mods
Consider the desired PHI is already loaded. To load the driver and combine PHI+LPI, use the command:
eva uc driver load <phi_id>.<lpi_id> <lpi_module> [-c config] [-y]
# in example, for PHI loaded as "v1":
eva uc driver load v1.ms multistep -c bose=true -y
Physical interfaces (PHI)
PHIs are modules, which contain no data processing logic but code to work directly with hardware equipment.
We provide a basic set of PHIs for the popular automation equipment (see EVA ICS v3 PHI modules), but if your equipment isn’t supported, it’s not so hard to develop your own PHI.
We’ve already described how to get and load PHIs, here is some additional important information.
Universal PHIs
If the word “universal” is listed in PHI features, it means the module can be loaded once and provide interface for all supported equipment. E.g. let’s take a look on sr201 PHI module which provides support for SR-201 compatible relays:
# get PHI module info
eva uc phi modinfo sr201
# get PHI configuration help
eva uc phi modhelp sr201 cfg
# get PHI options for obtaining the data
eva uc phi modhelp sr201 get
# get PHI options for setting the data
eva uc phi modhelp sr201 set
All of cfg, get and set have an option host which should be defined ether in PHI configutation (eva uc phi load with host config option or in the item driver configuration (eva uc driver assign with _host config option). Setting a different host option value in the item driver configuration lets one sr201 PHI manage all available SR-201 relays.
Physical events
If the word “events” is listed in PHI features, it means the module can handle hardware events e.g. react to the alarm sensors or update item state when an external event is received.
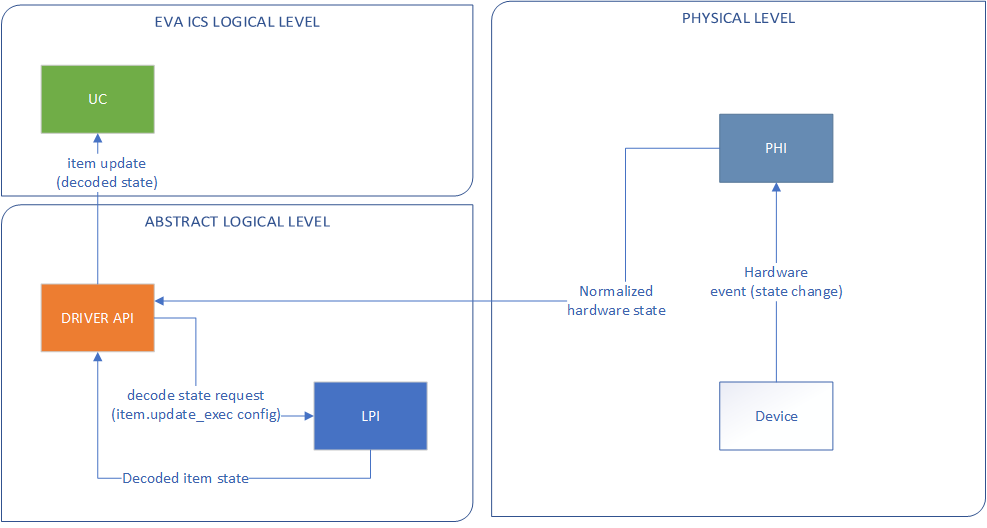
How the driver handles physical events
In practice, it means PHI provides data, obtained from the hardware, to controller and asks it to update all items using drivers which contain PHI module which have an event.
When doing update, drivers LPI modules don’t ask PHI to get hardware data working only with data already provided by the hardware.
Drivers and multi updates
If the word “aao_get” is listed in PHI features, it means you don’t need to create multiupdates in Universal Controller to update several items at once. “aao_get” (all-at-once-get) means PHI can obtain all hardware data itself and then ask the controller to update all items using drivers which contain PHI equally to updating on physical events.
How to use this feature: All PHIs with “aao_get” feature also have configuration param named update which means how frequently (in seconds) PHI should collect data from the equipment and initiate item updates. update value should be defined in PHI load config and be greater than zero.
Example:
eva uc phi load relay2 sr201 -c host=192.168.20.2,update=5 -y
As soon as the driver is assigned to item (eva uc driver assign), it starts getting state updates every 5 seconds.
Testing PHIs and additional PHI commands
As soon as PHI is loaded, you can test how it works. All PHI modules respond to the command:
eva uc phi test <phi_id> self
which returns result “OK” or “FAILED”.
PHI can provide additional testing; to get a list of testing commands, execute:
eva uc phi test <phi_id> help
Some PHIs can provide additional commands to set up or control the hardware equipment. To get a list of these commands, execute:
eva uc phi exec <phi_id> help
Example: PHI module dae_ro16_modbus has a command to change Modbus unit ID of the hardware equipment. Let’s change unit ID to 5:
eva uc phi exec <phi_id> id 5
The module will flash new unit ID into hardware and change unit ID in self configuration. Don’t forget to restart the hardware to let it be accessed with new unit ID and save PHI config (eva uc save).